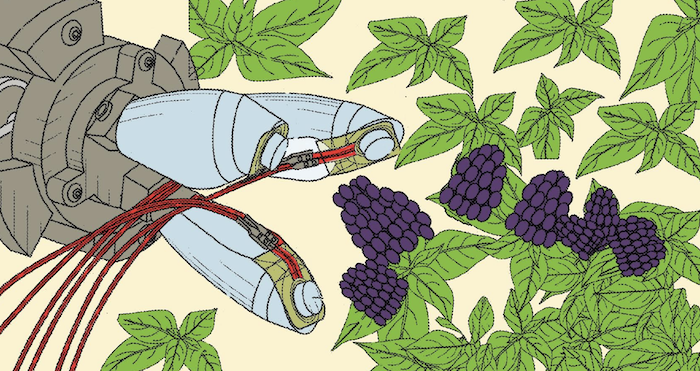
This artist’s conception illustrates how a recent University of Arkansas patent might be used to develop a mechanical harvester for soft fruits such as blackberries and raspberries. Trained with AI, such a machine would be able to locate and pick the fruit while at the same time bypassing damaged or diseased berries for improved in-field quality control. Source: University of Arkansas Technology Ventures
It was only a matter of time until the answer to the politically-charged question: “Who’ll pick our crops?,” received the following answer: “Very likely, technology.”
Faced with serious shortages of farm labor over recent years, the fresh fruit market has been hit particularly hard during its short harvest window for fresh fruit and berries. In Arkansas, where fresh-market blackberries (sold in plastic clamshells at most supermarkets) account for $24.3 million per year to the state’s economy, researchers are developing technology to help growers swap “Help Wanted” signs for AI-driven artificial hands — trained specifically to know how to pick blackberries and reject fruits not suitable for market.
The University of Arkansas Technology Ventures recently patented the invention for a “Soft Robotic Gripper for Berry Harvesting.” This technology is the brainchild of Anthony Gunderman, an assistant professor in the school’s department of mechanical engineering.
Gunderman and his associates developed a 3-finger gripper of a soft, pliable material, controlled by a guitar-string “tendon.” Such soft-robotics development has been underway since the 1960s and frequently looks to nature for models for inspiration.
In explaining its design, Gunderman says he was inspired by the way a tulip flower opens and closes when sunlight hits it.
“On the tip of each robotic finger is a force sensor, which ensures the gripper can pluck the berry without crushing it,” he explains, noting that roughly-handled berries can be damaged at harvest or turn red after picking — a condition called red drupelet reversion. Both are undesirable conditions for consumers and USDA inspectors.
To determine the force needed to pick blackberries without damage, the engineers worked with food scientists within the Arkansas Agricultural Experiment Station. They attached sensors to the fingertips of experienced blackberry pickers and measured how much force they applied when harvesting.
Gunderman says before the technology can be deployed commercially to mechanical harvesters, the computer vision and positioning technologies, which would enable the robot to find and reach for the berries or other bush and tree-fruits on the plant, still need to be developed.
“Currently, heartier fruits like blueberries and pears are commonly harvested by machines, and even blackberries that will be frozen or processed are harvested by ‘rougher’ automated mechanical harvesters,” he explains.
The researcher has high hopes for the robotic hand, especially when it can be designed and trained for a singular, specific task.
“Under those conditions, the robotic gripper could be more consistent than human workers, and in that case would be ‘better than the human hand,” says Gunderman.
During testing, the robotic gripper was used on a range of subjects, from hard items like a jar of pears and a can of beans to soft, flexible objects like a bag of potato chips and a T-shirt.
Gunderman says the gripper technology also could be used in prosthetic designs for people with limited mobility due to injury or age.
From this author’s standpoint, we see the innovation as a definite milestone in the search for mechanized solutions to the many-pronged overall labor shortage plaguing production agriculture. As written before, one needs only to look at order-taking kiosks at McDonald’s to realize that many labor problems can be solved by the engineering department.





