Take 5 minutes to watch the "Prospero Robot Overview" video below. In the short video you’ll see a one-off, 6-legged robot that’s capable of walking in a farm field, planting corn in ground not already-seeded, marking the seeded spot and moving on to plant again. A pair of eye-like ultra-sonic sensors help the autonomous micro-planter avoid obstacles and communicate with others of its kind to plant where conditions warrant. While it does plant seed, most farmers will probably say, “That thing’s slow, and it doesn’t plant in rows!”
|
Prospero Robot Overview
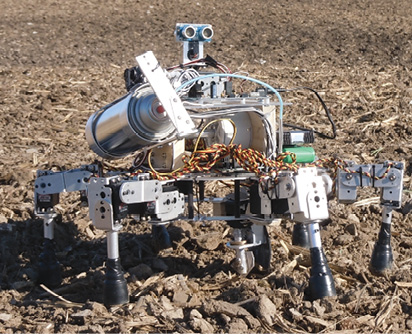
This insect-looking robot, named Prospero, while small in stature and limited in capacity, reveals a glimpse of machines of the not-too-distant future that will take precision agriculture to another level of automation. Photo Courtesy of Dorhout R&D |
Inventor David Dorhout, an Iowa native with a career in agronomics and now robotics at Dorhout R&D LLC, agrees, but says planting in rows may not be necessary as robotics begin to change the face of agriculture. In fact, he says one of the points made by building “Prospero” is to show that despite farming continually “getting bigger” for efficiency’s sake, farmers are gradually realizing they’re having to think in “smaller resolution” to make the best management decisions.
“Look at it this way,” Dorhout explains. “We’ve long since advanced past planting all one hybrid on a farm, and with yield maps and GIS support for GPS-controlled equipment, we don’t put the same amount of fertilizer on all of even one field. So we’re thinking in smaller chunks despite the fact we’re farming more acres than ever.”
Semi-Automated Farms
That’s where small robots will revolutionize our already semi-automated farms, he explains. As far as Prospero being slow, Dorhout says he would envision a “swarm” of these hexapods, or something similar, all working independently in a field but in constant communication with one another. And rows? If we aren’t pulling a planter in a straight line behind a huge tractor, rows might not be necessary. That might be addressed with specialized robots that move through a field and harvest crops based on maturity and actual grain moisture content, rather than averages, or “if a storm’s coming.”
Meanwhile, as a “swarm” of Prosperos work their way through the field in Dorhout’s thinking, the farmer, freed from being glued to a driver’s seat in a tractor can be spending more time managing the variables of agronomics, markets and climate conditions.
“The farmer has been the key element in agriculture since the first planting tool was made from a sharp stick. We’ve just tried to make those tools more efficient — through horse power and horsepower — and in doing so, make the farmer more productive.
“As we’ve done those things, certain compromises enter in as production units get larger. The farmer has only a few minutes per acre, and now we’re asking for more ‘resolution’ in decision making. It’s time robots began pitching in to give the farmer more time for those decisions.
“We’re already making planting decisions on smaller scales with multiple-hybrid planters and variable rate fertilizer technology. Ideally, we might someday see harvesting done in a similar fashion — on a plant-by-plant basis. Remember, robots can be smaller machines and that removes the threat of compaction due to repeated field trips.”
Currently, similar technology is already at work in commercial greenhouses where robots take care of watering chores on an individual plant basis, and Dorhout says such “tending” applications are likely where engineering and technology will first expand robotics on farms.
Despite Prospero’s role as a demonstration planting machine, Dorhout says he doubts planting and harvesting chores will be the first roles robots play in modern farming. “The risk is very high, so we’ll probably see robots become popular in support roles.”
“We spend tremendous effort and resources growing beautiful monocrop systems,” the inventor says, and robots could be a vital resource in weeding. “Corn plants tend to grow very straight and with uniform thickness. A robot can easily be programmed to look for anything that isn’t straight and within a corn plant’s given stage of growth’s predicted diameter and destroy it. It doesn’t need to know what it is, it’s just not corn.”
“Replanting, too, would be an excellent chore for a small, non-compacting robot, which could get into those ‘impossible to access’ wet spots or hail damaged areas. The only risk is the seed,” Dorhout explains. “Now, a farmer with 2,000 acres made up of a number of 300- and 400-acre farms knows there are wet spots, and areas with less-than-ideal fertility or soil structure. For the most part, he can’t do anything about it. With robots, it’s a different matter.”
Another task that seems ripe for robotic labor would be end-of-season soil sampling, he notes. “A robot could easily follow existing soil fertility maps and take top soil and subsoil samples for nutrient analysis.”
‘Smaller’ is Here
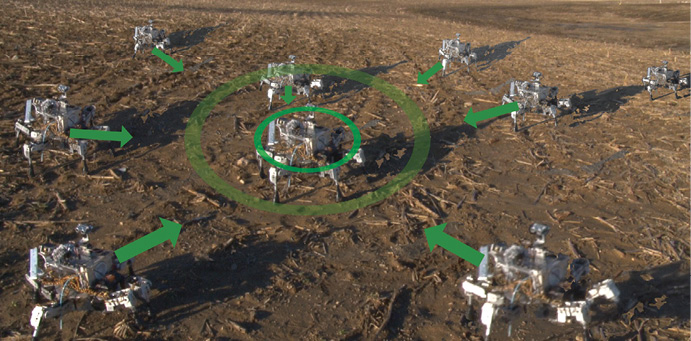 Farming machines requiring no operator on-board can be small and work in “communicating groups” to accomplish precision tasks, such as weeding, data gathering and even planting and harvesting. Photo Courtesy of Dorhout R&D |
Kinze’s Autonomous Grain Harvesting system takes advantage of a touch-screen Android tablet to interface with Jaybridge Robotics software in controlling autonomous grain carts.
Initial field studies conducted over the past several seasons have used a relatively small, automated vehicle that can make numerous trips from the combine to a waiting semi-trailer rig. During its routine trips it takes cues from pre-harvest planned paths, spinning laser range finder (LIDAR) and automotive RADAR, along with continually changing field maps reflecting harvested acres that become “driving areas” as harvest proceeds. In addition, the vehicle is in constant real-time communication with the combine whether it’s following, approaching or in “formation” as the combine operator unloads the grain tank on the go.
So far, all of the electronics and servo mechanisms used in the Kinze product are commercial “off the shelf” parts which means reasonable prices for readily-available parts.
On another robotic front, Autonomous Tractor Corp., St. Michael, Minn., surprised folks with an autonomous diesel-electric tractor a year or so ago, and found considerable interest in the machine.
In published reports, however, owner Terry Anderson says the company is concentrating on self-powered implements and their control systems. “There’s no future in tractors,” he said, noting the new implements under development use the same power platform of the original tractor — a pair of 200 horsepower Isuzu diesel engines driving a generator to power the tracks and other implement functions — all without a cab, air-conditioner, transmissions, differentials and huge wheels and axles.
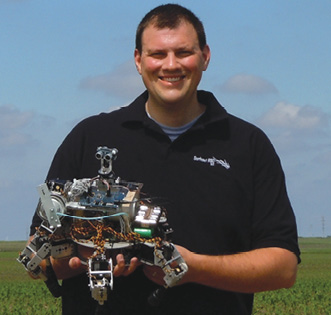 Inventor Dave Dorhout says he doesn’t expect his prototype robot Prospero to be commercialized, but built the autonomous micro-planter to illustrate the potential of robotics to add precision to the developed world’s semi-automated precision farming. Photo Courtesy of Dorhout R&D |
The first product from Autonomous was a 400-bushel grain cart. Currently, planting, tilling and fertilizing attachments and toolbars are under development with market entry targets set later this year.
Army of Field Scouts
There’s an old saying that the most important thing a farmer can put on his field is “footprints.”
Based on that, today’s modern army of field scouts and crop advisors has shown “boots on the ground” in fields can effectively enhance yields and profits. Robots, however, could multiply the efforts of field scouts by being in the field 24 hours a day, visiting literally hundreds of sites to gather information on the plants, pests, soil moisture levels, the weather, etc.
The opportunities lie in having even more information from which to base decisions against computer models. Consider the site-specific decisions possible if a farmer had daily plant leaf area index readings, plant leaf nutritional analysis (GreenSeeker), root zone and subsoil moisture levels, soil and crop canopy temperatures, solar radiation received from all areas of the field, not just random sample measurements.
It’s this possibility that has excited Dorhout. “I’m really interested to see what the farmers of tomorrow will come up with if they are given a tool that tends their fields inch by inch or plant by plant.”





